Question 6.AE.9: The drive motor of a piston compressor is a nonsalient-pole ......
The drive motor of a piston compressor is a nonsalient-pole synchronous motor with an amortisseur. To compensate for the piston stroke an eccentric shaft is employed. The load (L) torque at the eccentric shaft consists of an average torque and two harmonic torques:
T_L = T_{Lavg} + T_{L1} + T_{L4}, (E6.9-1)
where
T_{\mathrm{Lavg}}=265.53 \mathrm{kNm} (E6.9-2)
T_{L 1}=31.04 \mathrm{kNm} \sin \left(\omega_{m s} t-\pi\right) (E6.9-3)
T_{L 4}=50.65 \mathrm{kNm} \sin \left(4 \omega_{m s}-\pi / 6\right) (E6.9-4)
The drive motor and the flywheel are coupled with the eccentric shaft, and the nonsalient-pole synchronous motor has the following data: P_{rat}=7.5 MW, p=28 poles, f=60 Hz, V_{L-Lrat}=6 kV, \cos φ_{rat}=0.9 overexcited, η_{rat}=96.9%, T_{max}/T_{rat}=2.3.
The slip of the nonsalient pole synchronous motor when operating as an induction motor is s_{rat}=6.8% at T_{rat}.
a) Calculate the synchronous speed n_{ms}, synchronous angular velocity ω_{ms}, rated stator current \tilde{I}_{a \_ \text {rat }}, rated torque T_{rat}, the torque angle δ, stator current \tilde{I}_d \text { at } T_{\text {Lavg }} and the synchronous reactance X_S (in ohms and in per unit).
b) Neglecting damping provided by induction-motor action, derive the nonlinear differential equation for the motor torque, and by linearizing this equation find an expression for the eigen angular frequency ω_{eigen} of the undamped motor.
c) Repeat part b, but do not neglect damping provided by induction motor action
d) Solve the linearized differential equations of part b (without damping) and part c (with damping) and determine – by introducing phasors – the axial moment of inertia J required so that the first harmonic motor torque will be reduced to ± 4% of the average torque (Eq. E6.9-2).
e) Compare the eigen frequency f_{eigen} with the pulsation frequencies occurring at the eccentric shaft.
f) State the total motor torque T(t) as a function of time (neglecting damping) for one revolution of the eccentric shaft and compare it with the load torque T_{L(t)}. Why are they different?
Learn more on how do we answer questions.
a) n_{\mathrm{ms}}=(120 \cdot \mathrm{f}) / p=257.14 \mathrm{rpm}, \omega_{\mathrm{ms}}=\left(2 \pi \cdot n_{\mathrm{ms}}\right) / 60=26.927 \mathrm{rad} / \mathrm{s}.
T_{\mathrm{rat}}=\frac{P_{\mathrm{rat}}}{\omega_{m \mathrm{~s}}}=278.53 \mathrm{kNm} (E6.9-5)
\left|\tilde{I}_{a_{-} \mathrm{rat}}\right|=\frac{\mathrm{P}_{\mathrm{rat}}}{\sqrt{3} \cdot V_{L-L \mathrm{rat}} \cos \varphi_{\mathrm{rat}} \eta_{\mathrm{rat}}}=827.6 \mathrm{~A} (E6.9-6)
The average load torque T_{Lavg}=265.53 kNm leads with
T_{L avg}=\frac{3\left|\widetilde{E}_a\right|\left|\widetilde{V}_{a \_ \text {rat }}\right|}{X_s \omega_{m s}} \sin \delta \text { and } T_{\max }=\frac{3\left|\widetilde{E}_a\right|\left|\widetilde{V}_{a \_ \text {rat }}\right|}{X_s \omega_{m s}}to the ratio
\begin{aligned} \frac{T_{\text {Lavg }}}{T_{\max }} & =\sin \delta \text { or } \delta=\sin ^{-1}\left(\frac{T_{\text {Lavg }}}{2.3 \cdot T_{\text {rat }}}\right) \\ & =0.427 \mathrm{rad} \text { or } 24.48^{\circ} . \end{aligned} (E6.9-7)
Figure E6.9.1 defines the torque angle δ.
From the phasor diagram (overexcited, consumer notation) one obtains
or
\left|\widetilde{E}_a\right|^2=\left|\tilde{V}_{a\_rat }\right|^2+2\left|\tilde{V}_{a\_rat }\right|\left|\tilde{I}_a\right| X_s \sin \varphi+\left(\left|\tilde{I}_a\right| X_s\right)^2 (E6.9-8)
and with
P=\frac{3\left|\widetilde{E}_a\right|\left|\widetilde{V}_{a\_rat }\right| \sin \delta}{X_s} (E6.9-9)
follows the second-order equation for X_S.
\begin{aligned} & {\left[\left(\frac{P}{3\left|\tilde{V}_{a_{-} \mathrm{rat}}\right| \sin \delta}\right)^2-\left|\widetilde{I}_a\right|^2\right] X_s^2} \\ & -\left(2\left|\widetilde{V}_{a_{\_} \mathrm{rat}}\right|\left|\widetilde{I}_a\right| \sin \varphi\right) X_s-\left|\widetilde{V}_{a_{-} \mathrm{rat}}\right|^2=0 . \end{aligned} (E6.9-10)
For the given operating point one gets
P=T_{\text {Lavg }} \cdot \omega_{m s}=7.14 \mathrm{MW},\left|\widetilde{V}_{a_{-} \mathrm{rat}}\right|=3.464 \mathrm{kV},
\begin{aligned} & \sin \delta=\frac{T_{\mathrm{Lavg}}}{T_{\max }}=\frac{T_{\mathrm{Lavg}}}{2.3 \cdot T_{\mathrm{rat}}}=0.4145 \\ & \cos \varphi=0.9, \sin \varphi=0.4359 \end{aligned} (E6.9-11)
cosφ = 0:9, sinφ = 0:4359,
\left|\widetilde{I}_a\right|=\frac{T_{\text {Lavg }} \cdot \omega_{m s}}{3 \cdot\left|\widetilde{V}_{a_{-} \mathrm{rat}}\right| \cdot \cos \varphi \cdot \eta_{\mathrm{rat}}}=789 \mathrm{~A}and therefore
X_s = 3:07 Ω. (E6.9-12)
With the base impedance of
Z_{\text {base }}=\frac{\left|\tilde{V}_{a \_ \text {rat }}\right|}{\left|\widetilde{I}_{a \_ \text {rat }}\right|}=4.18 \Omega (E6.9-13)
the per-unit synchronous reactance is
X_{s\_pu} = 0:74 pu (E6.9-14)
b) Nonlinear differential equation for the motor torque.
The torque equation is
T-T_L-J \frac{d \omega_m}{d t}=0 (E6.9-15
where
\begin{aligned} T & =T_{\max } \cdot \sin \delta, \delta=\frac{p}{2} \alpha, T_L=T_{L a vg}+T_{L 1}, \\ \alpha & =\omega_{m s} t-\omega_m t, \frac{d \alpha}{d t}=\left(\omega_{m s}-\omega_m\right), \frac{d \delta}{d t}=\frac{p}{2} \cdot \frac{d \alpha}{d t}, \\ \frac{d \delta}{d t} & =\frac{p}{2}\left(\omega_{m s}-\omega_m\right), \omega_m=\omega_{m s}-\frac{1}{p / 2} \cdot \frac{d \delta}{d t}, \\ \frac{d \omega_m}{d t} & =-\frac{1}{p / 2} \frac{d^2 \delta}{d t^2}\quad (E6.9-16) \end{aligned}The nonlinear differential equation becomes
T_{\max } \sin \delta-T_{L a v g}-T_{L 1}+\frac{J}{p / 2} \frac{d^2 \delta}{d t^2}=0 (E6.9-17)
Linearization of the nonlinear differential equation is based on Fig. E6.9.2.
The motor torque is
T=T_{\max } \sin \left(\delta_0+\delta_1\right)=T_{\max } \sin \delta_0+T_{\max } \delta_1 \cos \delta_0 (E6.9-18)
or with the synchronizing torque S=T_{max} cos δ_o, the linearized differential equation becomes
\delta_1+\frac{J}{(p / 2) S} \frac{d^2 \delta_1}{d t^2}=\frac{T_{L 1}}{S} (E6.9-19)
The eigen-angular frequency of the undamped machine can be defined by
\omega_{\text {eigen }}=\sqrt{\frac{(p / 2) S}{J}} (E6.9-20)
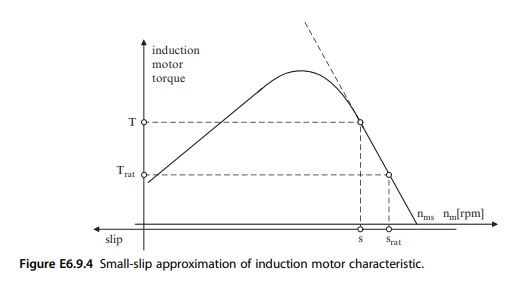
c) Repetition of part b, but not neglecting damping provided by induction motor action as is indicated in Fig. E6.9.3. The small-slip approximation of an induction motor is depicted in Fig. E6.9.4.
From Fig. E6.9.4 one obtains for the motor torque developed by induction-motor action
or
T_{\text {induction }}=\frac{T_{\text {rat }}}{s_{\mathrm{rat}}} \frac{1}{(p / 2) \cdot \omega_{m s}} \cdot \frac{d \delta}{d t} . (E6.9-21b)
With the power system’s frequency ω_s=2πf and ω_s=(p/2)ω_{ms} one obtains the total motor torque
T=T_{\max } \sin \delta+\frac{T_{\mathrm{rat}}}{s_{\mathrm{rat}}} \cdot \frac{1}{\omega_s} \cdot \frac{d \delta}{d t} (E6.9-21c)
or the nonlinear differential equation including the damping due to induction-motor action
\frac{J}{(p / 2)} \frac{d^2 \delta}{d t^2}+\frac{T_{\mathrm{rat}}}{s_{\mathrm{rat}} \cdot \omega_s} \frac{d \delta}{d t}+T_{\max } \sin \delta=T_{L avg}+T_{L 1} (E6.9-22)
Linearization leads to the differential equation
\frac{J}{(p / 2)} \frac{d^2 \delta_1}{d t^2}+D \frac{d \delta_1}{d t}+S \delta_1=T_{L 1},(\mathrm{E} 6.9-23)where the damping factor is
D=\frac{T_{\mathrm{rat}}}{s_{\mathrm{rat}} \cdot \omega_s} (E6.9-24)
d) Solution of the linearized differential equations of part b – without damping – and determining (by introducing phasors indicated by “˜”) the axial moment of inertia J required so that the first harmonic motor torque T_1(t) will be reduced to ± 4% of the average torque (Eq. E6.9-2).
Neglecting damping one obtains for the kth harmonic the differential equation
\delta_1+\frac{1}{\omega_{\text {eigen }}^2} \frac{d^2 \delta_1}{d t^2}=\frac{T_{L k}}{S} . (E6.9-25)
Replacing \frac{d}{d t} \text { by } j \omega_k for sine/cosine variations of harmonic torques one gets
\widetilde{\delta}_1+\frac{1}{\omega_{\text {eigen }}^2}\left(j \omega_k\right)^2 \widetilde{\delta}_1^2=\frac{\widetilde{T}_{L k}}{S} (E6.9-26)
With
\widetilde{T}_k=T_{\max } \cos \tilde{\delta}_0 \widetilde{\delta}_1=S \cdot \widetilde{\delta}_1 (E6.9-27)
follows
\frac{\widetilde{T}_k}{\widetilde{T}_{L k}}=\frac{1}{\left(1-\frac{\omega_k^2}{\omega_{\text {eigen }}^2}\right)} (E6.9-28)
or magnitudes only where “^” indicates amplitude
\frac{\left|\widetilde{T}_k\right|}{\left|\widetilde{T}_{L k}\right|} \equiv \frac{\hat{T}_k}{\hat{T}_{L k}}=\frac{1}{\left[1-\left(\frac{\omega_k}{\omega_{\text {eigen }}}\right)^2\right]} (E6.9-29)
where \tan (\varepsilon)=0 \text { for } \omega_k<\omega_{\text {eigen }} \text { and } \tan (\varepsilon)=-180^{\circ} \text { for } \omega_{\mathrm{k}}>\omega_{\text {eigen }} (see E6.9-38).
For the first harmonic torque one can write
T_{L 1}=31.04 \mathrm{kNm} \sin \left(\omega_{m s} t-\pi\right), \hat{T}_1=\pm 0.04 T_{L a v g} (E6.9-30)
\frac{\hat{T}_1}{\hat{T}_{L 1}}=\frac{1}{\left(1-\frac{\omega_1^2}{\omega_{\text {eigen }}^2}\right)} (E6.9-31)
The required inertia becomes for the worst case (– sign):
\begin{aligned} J=\frac{S(p / 2)}{\omega_1^2}\left(1-\frac{\hat{T}_{L 1}}{\hat{T}_1}\right) & =\frac{2.3 \cdot T_{\mathrm{rat}} \cdot \cos \delta_o \cdot(p / 2)^3}{\omega_s^2} \\ \left(1-\frac{\hat{T}_{L 1}}{\hat{T}_1}\right) & =11.256 \cdot 10^3\left(1-\frac{31.04}{\pm 0.04 \cdot 265.53}\right) \\ & =44 \cdot 10^3 \mathrm{kgm}^2 \end{aligned} (E6.9-32)
Solution of the linearized differential equations of part c – with damping – and determining (by introducing phasors) the axial moment of inertia J required so that the first harmonic motor torque will be reduced to Not neglecting damping one obtains for the kth har ± 4% of the average torque (Eq. E6.9-2).
Not neglecting damping one obtains for the kth harmonic the differential equation
\frac{J}{(p / 2)} \frac{d^2 \delta_1}{d t^2}+D \frac{d \delta_1}{d t}+S \delta_1=T_{L k} (E6.9-33)
or for sine/cosine variations of harmonic load torques
\left(j \omega_k\right)^2 \frac{J}{(p / 2)} \cdot \widetilde{\delta}_1+j \omega_k D \widetilde{\delta}_1+S \widetilde{\delta}_1=\widetilde{T}_{L k} (E6.9-34)
with
\widetilde{S \delta}_1=\widetilde{T}_k (E6.9-35)
\frac{\widetilde{T}_k}{\widetilde{T}_{L k}}=\frac{1}{\left(j \omega_k\right)^2 \cdot \frac{J}{(p / 2) \cdot S}+j \omega_k \frac{D}{S}+1} (E6.9-36)
or the magnitudes only
\frac{\left|\widetilde{T}_k\right|}{\left|\widetilde{T}_{L k}\right|} \equiv \frac{\hat{T}_k}{\hat{T}_{L k}}=\frac{1}{\sqrt{\left(1-\omega_k^2 \frac{J}{(p / 2) \cdot S}\right)^2+\left(\omega_k \frac{D}{S}\right)^2}} (E6.9-37)
with
\tan (\varepsilon)=\frac{\omega_k \frac{D}{S}}{1-\omega_k^2 \frac{J}{(p / 2) \cdot S}} (E6.9-38)
The inertia is now
J=\frac{(p / 2) \cdot S}{\omega_k^2}\left[1 \mp \sqrt{\left(\frac{\hat{T}_{L k}}{\hat{T}_k}\right)^2-\left(\omega_k \cdot \frac{D}{S}\right)^2}\right] (E6.9-39)
With
\begin{aligned} & \omega_k=\omega_{m s}=\frac{\omega_s}{(p / 2)}, \hat{T}_{L k}=\hat{T}_{L 1}=31.04 \mathrm{kNm} \\ & \hat{T}_k=\hat{T}_1=0.04 \cdot 265.53 \mathrm{kNm}=10.62 \mathrm{kNm} \end{aligned}one obtains with D and S defined above
J=43.66 \cdot 10^3 \mathrm{kgm}^2 \approx 44 \cdot 10^3 \mathrm{kgm}^2 (E6.9-40)
Conclusion. Damping does not significantly influence the calculation of the required axial moment of inertia
e) Comparison of the eigen frequency f_{eigen} with the pulsation frequencies occurring at the eccentric shaft.
The angular eigen (resonance) frequency of the undamped oscillation is
or the eigen frequency is
f_{\text {eigen }}=\frac{\omega_{\text {cigen }}}{2 \pi}=2.17 \frac{1}{\mathrm{~s}} \text {. }The first harmonic pulsation (given by the load) frequency of the eccentric shaft is
\omega_1=\omega_{m s}=\frac{\omega_s}{(p / 2)}=\frac{2 \pi 60}{14}=26.93 \frac{1}{s} (E6.9-41)
The ratio between first harmonic pulsation frequency and resonance frequency is
\frac{\omega_1}{\omega_{\text {eigen }}}=\frac{f_1}{f_{\text {eigen }}}=1.98 \approx 2.0 . (E6.9-42)
The fourth harmonic pulsation (given by the load) frequency of the eccentric shaft is
\omega_4=4 \cdot \omega_{m s}=4 \cdot \omega_1 . (E6.9-43)
The ratio between fourth harmonic pulsation frequency and resonance frequency is
\frac{\omega_4}{\omega_{\text {eigen }}}=\frac{f_4}{f_{\text {eigen }}}=4 \cdot 1.98 \approx 8.0 . (E6.9-44)
Note that from a dynamic performance point of view it is desirable if
\frac{\omega_k}{\omega_{\text {eigen }}} \geq 3-4 (E6.9-45)
As can be seen the ratio \omega_1 / \omega_{\text {eigen }}=1.98 \approx 2.0 does not satisfy this condition and therefore the calculated axial moment of inertia of 44.10³ kgm² is not large enough. It is recommended to select a desirable axial moment of inertia of J_{desirable} that is larger than 44.10³ kgm² and results in \omega_1 / \omega_{\text {eigen }} \approx 3.0.
f) List the total motor torque T(t) as a function of time (neglecting damping) for one revolution of the eccentric shaft and compare it with the load torque T_L(t). Why are they different?
The total motor torque is now
\vec{T}=\vec{T}_{\text {Lavg }}+\vec{T}_1+\vec{T}_4 (E6.9-46)
where
\vec{T}_{\text {Lavg }}=265.53 \mathrm{k} \mathrm{Nm} (E6.9-47)
and the motor torque for the kth harmonic is
\vec{T}_k=\frac{\vec{T}_{L k}}{1-\left(\frac{\omega_k^2}{\omega_{\text {eigen }}^2}\right)} (E6.9-48)
For the first harmonic load torque one obtains
\begin{aligned} T_{L 1}(t) & =31.04 \mathrm{kNm} \sin \left(\omega_{m s} t-\pi\right) \\ & =-31.04 \mathrm{kNm} \sin \left(\omega_{m s} t\right) \end{aligned} (E6.9-49)
and the first harmonic motor torque becomes
T_1(t)=\frac{-31.04 \mathrm{kNm}}{1-\left(\frac{\omega_1^2}{\omega_{\text {eigen }}^2}\right)} \sin \omega_{m s} t=10.35 \mathrm{kNm} \sin \left(\omega_{m s} t\right) (E6.9-50)
For the fourth harmonic motor torque one gets
\begin{aligned} T_4(t) & =\frac{50.65 \mathrm{kNm}}{1-\left(\frac{\omega_4^2}{\omega_{\text {eigen }}^2}\right)} \sin \left(4 \omega_{m s} t-\frac{\pi}{6}\right) \\ & =-0.804 \mathrm{kNm} \sin \left(4 \omega_{m s} t-\frac{\pi}{6}\right) . \end{aligned} (E6.9-51)
Conclusions. The total load torque is
\begin{aligned} T_L(t)= & 265.53 \mathrm{kNm}+31.04 \mathrm{kNm} \sin \left(\omega_{m s} t-\pi\right) \\ & +50.65 \mathrm{kNm} \sin \left(4 \omega_{\mathrm{ms}} t-\pi / 6\right) \end{aligned} (E6.9-52)
and the total motor torque becomes
\begin{aligned} T(t)= & 265.53 \mathrm{kNm}+10.35 \mathrm{kNm} \sin \left(\omega_{m s} t\right) \\ & -0.804 \mathrm{kNm} \sin \left(4 \omega_{m s} t-\frac{\pi}{6}\right) . \end{aligned}The difference in the harmonic torques is provided by the flywheel with inertia of J=44.10³ kgm² .