Question 15.SP.13: The center of the double gear of Sample Prob. 15.6 has a vel...
The center of the double gear of Sample Prob. 15.6 has a velocity of 1.2 m/s to the right and an acceleration of 3 m/s² to the right. Recalling that the lower rack is stationary, determine (a) the angular acceleration of the gear, (b) the acceleration of points B, C, and D of the gear.
STRATEGY: The double gear is a rigid body undergoing general plane motion, so use acceleration kinematics. You can also differentiate the equation for the gear’s velocity and use that to find the gear’s acceleration.

Learn more on how we answer questions.
MODELING and ANALYSIS:
a. Angular Acceleration of the Gear. In Sample Prob. 15.6, you found that x_A=-r_1 \theta \text { and } v_A=-r_1 \omega. Differentiating the second equation with respect to time, you obtain a_A=-r_1 \alpha.
\begin{aligned}&v_A=-r_1 \omega \quad 1.2 \mathrm{~m} / \mathrm{s}=-(0.150 \mathrm{~m}) \omega \quad \omega=-8 \mathrm{rad} / \mathrm{s} \\&a_A=-r_1 \alpha \quad 3 \mathrm{~m} / \mathrm{s}^2=-(0.150 \mathrm{~m}) \alpha \quad \alpha=-20 \mathrm{rad} / \mathrm{s}^2 \\&\end{aligned}
\alpha=\alpha \mathbf{k}=-\left(20 \mathrm{rad} / \mathrm{s}^2\right) \mathbf{k}
b. Accelerations. The relationship between the acceleration of any two points on a rigid body undergoing general plane motion is
\begin{aligned}\mathbf{a}_B &=\mathbf{a}_A + \mathbf{a}_{B / A}=\mathbf{a}_A + \left(\mathbf{a}_{B / A}\right)_t + \left(\mathbf{a}_{B / A}\right)_n \\&=\mathbf{a}_A + \alpha \mathbf{k} \times \mathbf{r}_{B / A} – \omega^2 \mathbf{r}_{B / A}\end{aligned} (1)
This equation indicates that the rolling motion of the gear can be thought of as a translation with A and a rotation about A (Fig. 1).
Acceleration of Point B. Substituting values into Eq. (1) gives
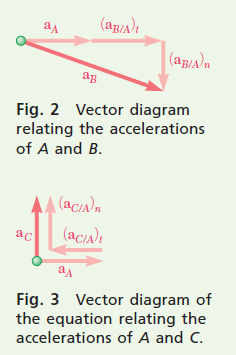
\begin{aligned}\mathbf{a}_B &=\mathbf{a}_A + \mathbf{a}_{B / A}=\mathbf{a}_A + \left(\mathbf{a}_{B / A}\right)_t + \left(\mathbf{a}_{B / A}\right)_n \\&=\mathbf{a}_A + \alpha \mathbf{k} \times \mathbf{r}_{B / A} – \omega^2 \mathbf{r}_{B / A} \\&=\left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} – \left(20 \mathrm{rad} / \mathrm{s}^2\right) \mathbf{k} \times(0.100 \mathrm{~m}) \mathbf{j} – (8 \mathrm{rad} / \mathrm{s})^2(0.100 \mathrm{~m}) \mathbf{j} \\&=\left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} + \left(2 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} – \left(6.40 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{j}\end{aligned}
\mathbf{a}_B=8.12 \mathrm{~m} / \mathrm{s}^2 \text { ⦪ } 52.0^{\circ}
The vector triangle corresponding to this equation is shown in Fig. 2.
Acceleration of Point C Referring to Fig 3
\begin{aligned}\mathbf{a}_C &=\mathbf{a}_A + \mathbf{a}_{C / A}=\mathbf{a}_A + \alpha \mathbf{k} \times \mathbf{r}_{C / A} – \omega^2 \mathbf{r}_{C / A} \\&=\left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} – \left(20 \mathrm{rad} / \mathrm{s}^2\right) \mathbf{k} \times(-0.150 \mathrm{~m}) \mathbf{j} – (8 \mathrm{rad} / \mathrm{s})^2(-0.150 \mathrm{~m}) \mathbf{j} \\&=\left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} – \left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} + \left(9.60 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{j}\end{aligned}
\mathrm{a}_C=9.60 \mathrm{~m} / \mathrm{s}^2 \uparrow
Acceleration of Point D (Fig. 4).
\begin{aligned}\mathbf{a}_D &=\mathbf{a}_A + \mathbf{a}_{D / A}=\mathbf{a}_A + \alpha \mathbf{k} \times \mathbf{r}_{D / A} – \omega^2 \mathbf{r}_{D / A} \\&=\left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} – \left(20 \mathrm{rad} / \mathrm{s}^2\right) \mathbf{k} \times(-0.150 \mathrm{~m}) \mathbf{i} – (8 \mathrm{rad} / \mathrm{s})^2(-0.150 \mathrm{~m}) \mathbf{i} \\&=\left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i} + \left(3 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{j} + \left(9.60 \mathrm{~m} / \mathrm{s}^2\right) \mathbf{i}\end{aligned}
\mathbf{a}_D=12.95 \mathrm{~m} / \mathrm{s}^2 \text{⦨} 13.4^{\circ}
REFLECT and THINK: It is interesting to note that the x-component of acceleration for point C is zero since it is in direct contact with the fixed lower rack. It does, however, have a normal acceleration pointed upward. This is also true for a wheel rolling without slip.