Prepare Bode diagram curves for the first-order system described by the differential equation
\frac{dy}{dt} +\frac{y}{\tau } =\frac{kx}{\tau } , (12.28)
where x(t) and y(t) are the input and output, respectively.
Prepare Bode diagram curves for the first-order system described by the differential equation
\frac{dy}{dt} +\frac{y}{\tau } =\frac{kx}{\tau } , (12.28)
where x(t) and y(t) are the input and output, respectively.
Step 1. Transforming to the s domain yields
sY(s)+\frac{Y(s)}{\tau } =\frac{kX(s)}{\tau } . (12.29)
The system transfer function is
T(s)+\frac{Y(s)}{X(s) } =\frac{k}{\tau s+1 } . (12.30)
Step 2. The sinusoidal transfer function is
T(j\omega )=T(s ){\mid _{s=j\omega } } =\frac{k}{j\omega \tau +1 } . (12.31)
Step 3. To simplify the process of obtaining expressions for T(ω) and \phi_{T} (ω), note that T(jω) can be presented as a ratio of complex functions N(jω) and D(jω):
T(j\omega )= \frac{N_{(j\omega )} }{D_{(j\omega )} } =\frac{N(\omega )e^{j\phi N(\omega )} }{D(\omega )e^{j\phi D(\omega )} } . (12.32)
or
T(j\omega )= \frac{N_{(\omega )} }{D_{(\omega )} } e^{j{\left[\phi _{N} (\omega )-\phi _{D} (\omega )\right] } } , (12.33)
so that the magnitude T(ω) is given by
T(\omega )= \frac{N_{(\omega )} }{D_{(\omega )} } . (12.34)
In this case, N(\omega )=k and D(\omega )=\left|j\omega \tau +1\right| , so that
T(\omega )=\frac{k}{\left|j\omega \tau +1\right| }=\frac{k}{\sqrt{1+\omega ^{2}\tau ^{2} } } (12.35)
and the phase angle \phi _{T} is given by
\phi _{T}(\omega ) =\phi _{N}(\omega )-\phi _{D}(\omega ) , (12.36)
where
\phi _{N}(\omega )=\tan ^{-1}(0/k) =0 , (12.37)
\phi _{D}(\omega )=\tan ^{-1}(\omega \tau /1) =\tan ^{-1}(\omega \tau) . (12.38)
Hence
\phi _{T}(\omega )=0-\tan ^{-1}(\omega \tau ) =-\tan ^{-1}(\omega \tau) . (12.39)
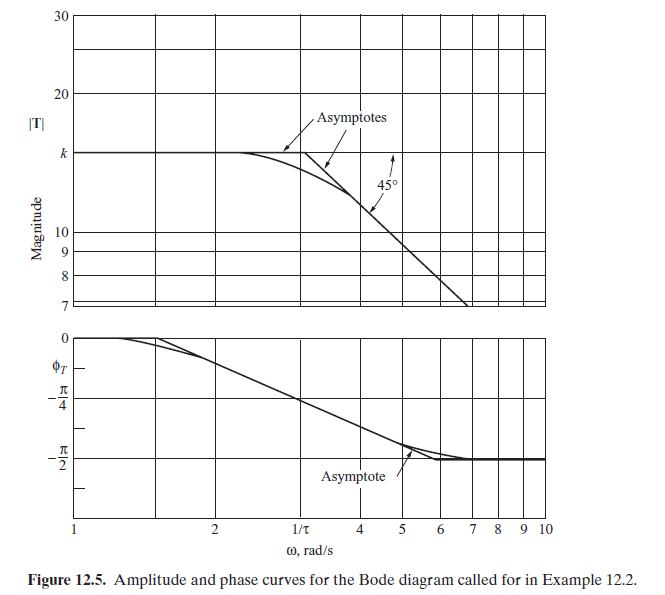
Step 4. The Bode diagram curves for amplitude and phase can now be plotted with calculations based on the expressions for T(ω) and \phi_{T}(ω) developed in Step 3. The resulting magnitude and phase curves for this first-order system are shown in Fig. 12.5.
In a preliminary system analysis, it is often sufficient to approximate the amplitude and phase curves by use of simple straight-line asymptotes, which are very easily sketched by hand. These straight-line asymptotes are included in Fig. 12.5. The first asymptote for the magnitude curve corresponds to the case in which _ is very small, approaching zero. Using Equation (12.35) for the magnitude as ω→0 yields
\underset{\omega \rightarrow 0}{\lim }\left[\log T(\omega )\right] =\underset{\omega \rightarrow 0}{\lim }\left(\log \frac{k}{\sqrt{1+\omega ^{2}\tau ^{2} } } \right) =\log k . (12.40)